Tin tức công nghệ
Lý thuyết điều khiển pid controller | phương pháp ziegler nichols
Th3
PID controller là gì ? Bộ điều khiển pid là gì ? Thế nào là tín hiệu SSR
Điều khiển tín hiệu 4-20mA dạng tuyến tính và điều khiển 4-20mA dạng PID là 2 phương thức sử dụng để điều khiển nhiệt độ hoặc áp suất trong dây chuyền sản xuất. Tuy nhiên; 2 phương thức điều khiển này hoàn toàn không giống nhau. Vậy !
XEM NHANH TẠI ĐÂY
Bộ điều khiển PID controller là gì
Bộ điều khiển pid controller là một phương pháp được sử dụng để kiểm soát mức độ tăng giảm nhiệt độ tại khu vực đo; lượng áp suất trong đường ống, lưu lượng dòng chảy…PID được cho là một đạo hảm tích phân theo một tỷ lệ nhất định đã được calip trước
Phương pháp điều khiển pid tuyến tính 4-20mA được xem là một trong những phương pháp điều khiển nhiệt độ + áp suất có độ ổn định và tính chuẩn xác cao nhất
Bên cạnh điều khiển mức tăng giảm nhiệt hoặc áp trên đường ống. Bộ điều khiển pid còn cho phép hiển thị nhiệt độ hoặc áp suất thực tế tại khu vực đo
Các bạn có thể tham khảo chi tiết thực tế của một thiết bị điều khiển pid hoàn chỉnh tại:
Bộ điều khiển pid ATR244-12ABC
Lịch sử hình thành bộ điều khiển PID
Bộ điều khiển nhiệt độ hoặc áp suất sử dụng pid được phát triển mạnh mẽ vào năm 1911 bởi Elmer Sperry.
Tuy nhiên; mãi đến năm 1933 nó mới được đưa vào vận hành điều khiển khí nén theo tỷ lệ calip sử dụng trong việc điều khiển van. Đến năm 1940 thì bộ này dẫn được hoàn thiện và khắc phục một vài lỗi thiếu sót
Lý thuyết điều khiển PID
Vậy thực tế bộ điều khiển PID hoạt động như thế nào ?
Bộ điều khiển PID hoạt động dưa trên 3 hình thức Tỷ lệ – Tích phân và cuối cùng là đạo hàm
Trong đó:
Tỷ lệ ở đây chính là sự tuyến tính một cách chuẩn xác theo một cách chia tỷ lệ chung nhất định
Tích phân là sự điều khiển với nhiều mức khác nhau. Ví dụ cảm biến đo áp suất với tỷ lệ áp 0-6 kg tương ứng đầu ra 4-20mA ngườu dùng muốn điều khiển 2 mức A và B. Nếu dưới ngưỡng mức A đề nghị tự động tăng áp; và vượt ngưỡng B thì tự động giảm áp mà không cần sự can thiệp của con người
Đạo hàm là phần hiệu chỉnh thời gian lấy mẫu sao cho phù hợp để tránh tình trạng quá áp lớn mới hiệu chỉnh giảm áp. Tức là nó làm tăng thêm độ nhạy cho thiết bị
Các bộ điều khiển PID hiện nay
Có 2 loại bộ điều khiển PID chính :
Bộ điều khiển PID đóng ngắt on-off

Là một trong những phương thức điều khiển giám sát thông qua pid có kết cấu đơn giản với mức giá khá rẻ so với pid theo tỷ lệ và tiêu chuẩn
Nơi một cách đơn giản chính là bộ này ta chỉ setting được 2 trường hợp và nó hoàn toàn không tuyến tính.
Ví dụ:
Cảm biến nhiệt độ pt100 phạm vi đo 0-350 oC tín hiệu ra tương ứng 4-20mA. Người dùng muốn ở mức 150 oC bộ này phải output 1 tiếp điểm để điều khiển tăng nhiệt. Và tới 300 oC phải đá relay giảm nhiệt
Trường hợp này sử dụng bộ điều khiển pid dạng on-off tại 2 điểm nêu trên. Nó cứ hoạt động liên tục như thế theo vòng tuần hoàn
Bộ điều khiển pid theo tỷ lệ
Bộ này cũng có chức năng điều khiển on-off như bộ trên hoặc có thể cài đặt điều khiển liên tục theo một tỷ lệ nào đấy thông qua dòng output 4-20mA. Tuy nhiên; tích hợp trên bộ pid theo tỷ lệ là khả năng khai báo tốc độ lấy mẫu tín hiệu theo tỷ lệ chung nhất định
Bộ điều khiển pid theo tỷ lệ có độ nhuyễn trong hiệu chỉnh và độ chính xác cao gần như tuyệt đối vì căn bản nó điều khiển đóng ngắt liên tục theo từng chu kỳ trên dòng 4-20mA
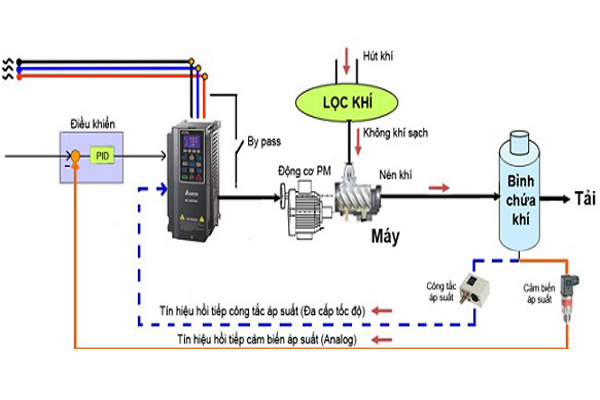
Hệ thống điều khiển PID gồm những gì
Tùy từng bài toán sản xuất cụ thể sẽ có một hệ thống pid hiệu chuẩn khác nhau. Ví dụ:
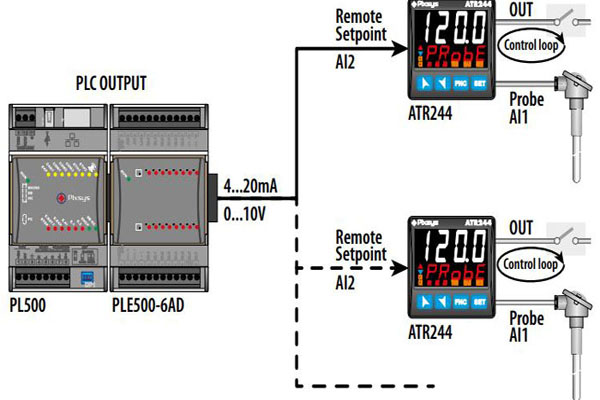
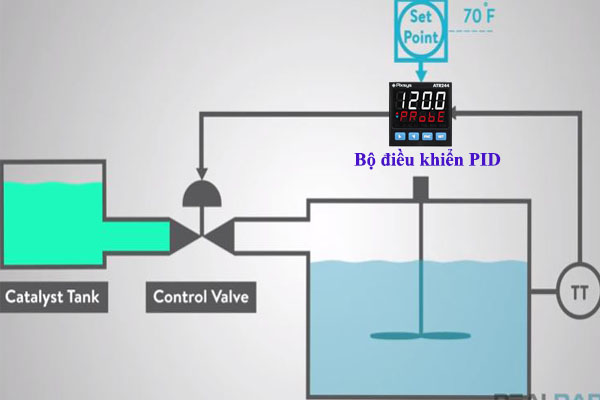
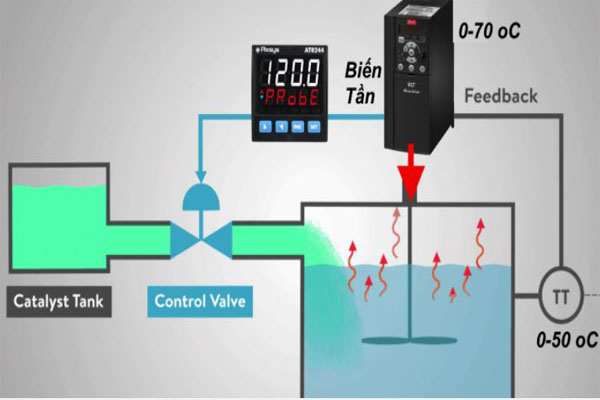
Đơn giản nhất cho một hệ thống tuần hoàn điều khiển dùng pid chính là một cây cảm biến đo nhiệt độ + Van điều khiển tuyến tinha bằng điện 4-20mA và thiết bị lập trình PLC
Hệ thống này có thể áp suất điều khiển áp suất hơi nóng trên đường ống hoặc lưu lượng các loại chất lỏng thông qua van điều khiển tuyến tính 4-20mA
Cách chọn thông số pid (Kp, Ki, Kd)
Việc tìm và xác định thông số pid một cách chính xác chúng ta có tới 4 phương pháp. Các phương pháp này có thể áp dụng theo phương thức thủ công hoặc tính toán dựa vào phần mềm hoặc công thức
Dưới đây là 4 phương pháp phổ biến giúp người dùng xác định ngay được các thông số PID dựa trên lý thuyết. Tuy nhiên; ở bài này chúng tôi chỉ giới thiệu các phương pháp. Còn thực tế đi sâu chi tiết về từng phương pháp một cách cụ thể sẽ chia sẻ trong bài tiếp theo vì các phương pháp rất dài
Phương pháp kiểm soát thông số pid bằng tay
Là phương thức đưa các giá trị Ki = Kd đồng thời quy chúng về giá trị = 0. Sau đó; ta hiệu chỉnh giá trị Kp tăng dần đến khi nào hệ thống dao động tuần hoàn ổn định thì ngưng
Hiệu chuẩn time tích phân tương ứng với chu kỳ dao động tuần hoàn
Kiểm soát lại giá trị Kp vừa khớp với yêu cầu bài toán. Trong qua trình hiệu chỉnh; nếu xảy ra hiện tượng thay đổi do dao động đột biến thì ta hiệu chuẩn thêm giá trị Kd
Phương pháp Ziegler – Nichols
Được xem là một trong những phương pháp chọn ra thông số điều khiển PID hữu hiệu nhất
Với phương pháp này ta giả sử Ki = Kd trong điều kiện đưa về giá trị 0 giống phương pháp trên. Tiếp tục tăng Kp ( Lúc này Kp cũng được xem là Kc )
Sau đó; ta đo đếm chu kỳ dao động Pc là xong
Sử dụng phần mềm chọn thống số pid
Xác định thông số trong điều khiển pid bằng phần mềm được xem là phương án tối ưu vì nó có độ chính xác rất cao
Ở đây ta có thể tìm pid dựa trên thuật toán điều khiển hiệu chỉnh từ phần mềm trong một mô hình thực nghiệm pid ảo
Tham khảo thêm bài viết liên quan:
Bộ điều khiển nhiệt độ pixsys atr144-abc